Upcoming Events:
Error 406 - Not Acceptable
Generally a 406 error is caused because a request has been blocked by Mod Security. If you believe that your request has been blocked by mistake please contact the web site owner.
Full event list
Error 406 - Not Acceptable
Generally a 406 error is caused because a request has been blocked by Mod Security. If you believe that your request has been blocked by mistake please contact the web site owner.
FIRST® Robotics Competition (FRC®)
Control System 1995-1996
Prior to 2000 the control system used for the FIRST Robotics Competition (FRC) was loaned to teams and had to be returned
at the end of each season for reuse the next year.
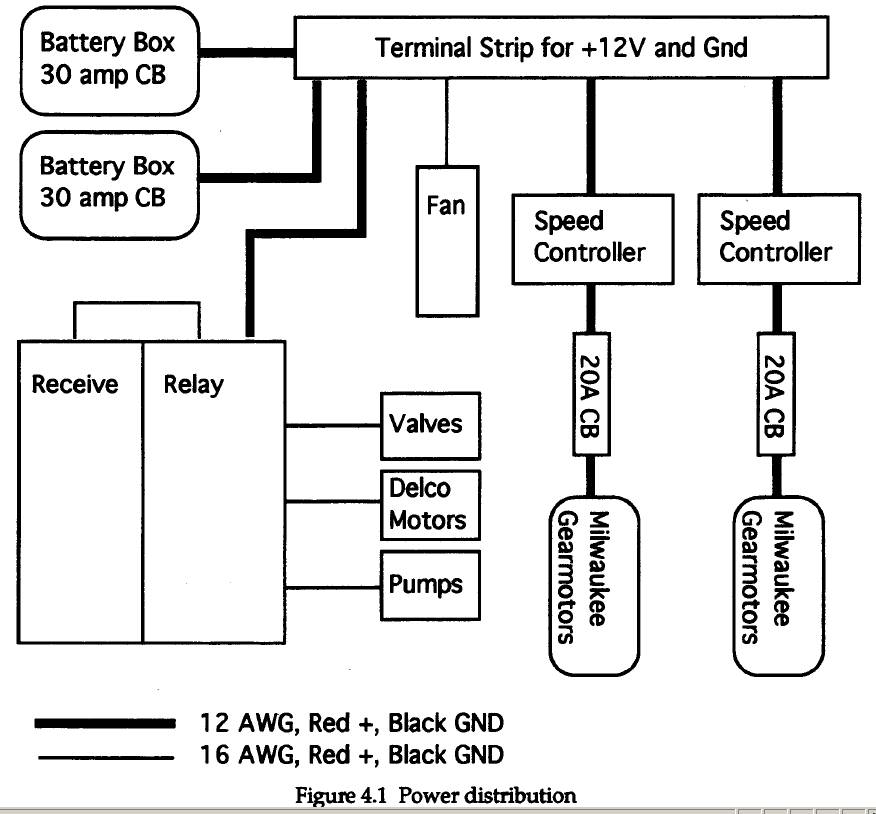
Control System Components
The control system was essentially a radio controlled car system and was not programmable. It provided much more fine-tuned control than previous systems with the introduction of real variable speed joysticks (CH Flightstick).It had three major components:
- Transmitter - driver controls
- Receiver/Relay Box - RC-style robot controller
- Motorola RNet 9600 radio modems - 411MHz telemetry data radio transmitter & receiver connected to the two components above
The radio modems were bypassed by unplugging them and connecting a cable tethering the Driver controls directly to the robot.
FIRST 1996 Control System Manual
Receiver/Relay Box (Robot Controller)
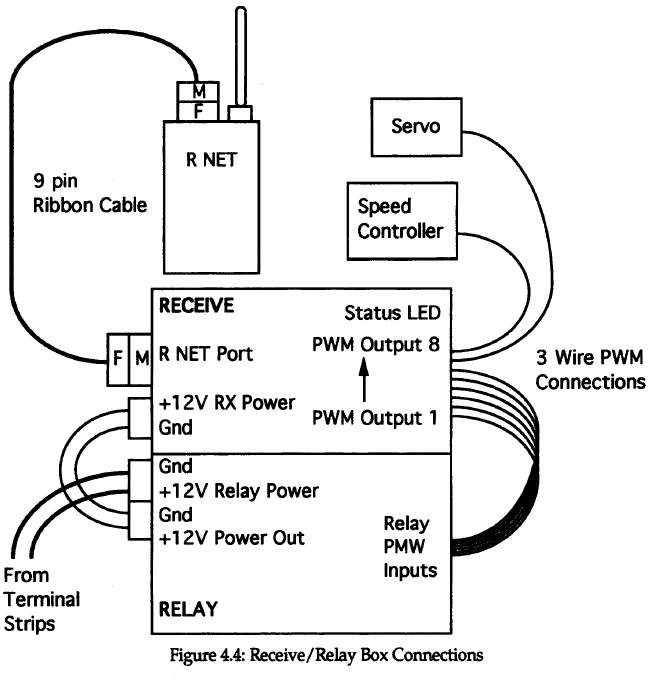
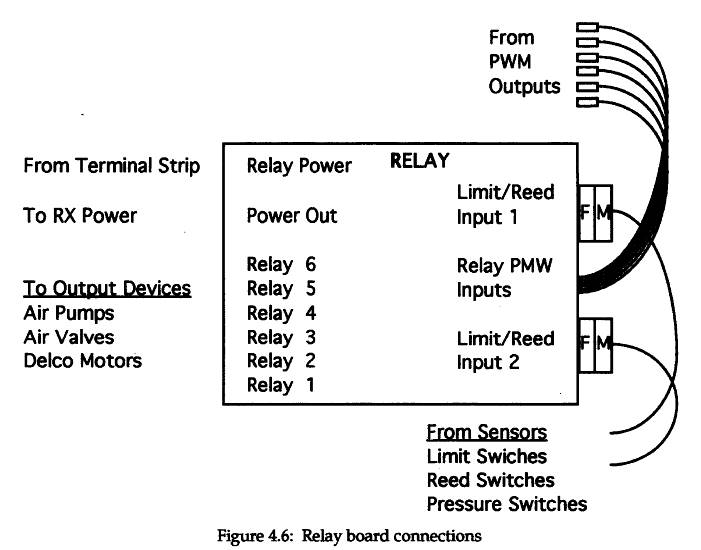
- 8 PWM outputs - 6 can be used to drive relays (forward/reverse/off). At least one must be used for Relay.
- 6 Relay outputs - driven by PWM output or onboard switches, e.g. limit switch
- 2 Relay switch inputs
- RNet radio Port
Transmitter (Driver Controls)
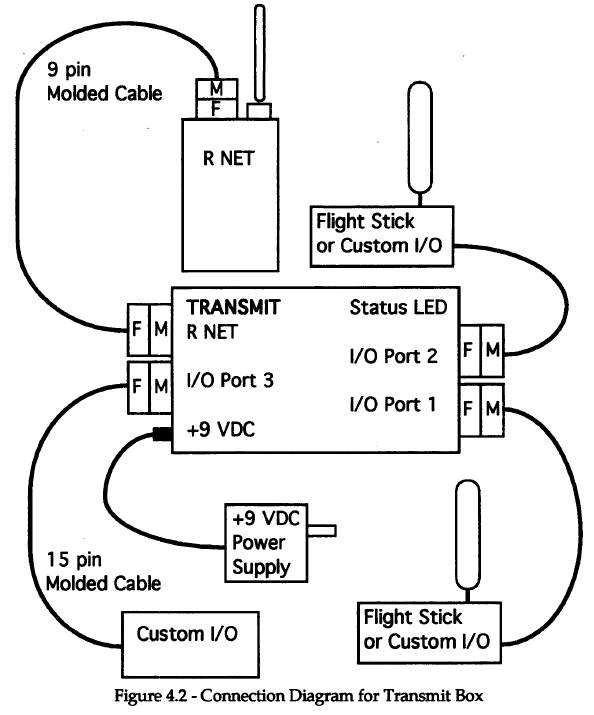
Only 8 inputs can be sent to the robot, but there are 12 available input channels (8 variable + 4 (forward/reverse/off)) selectable by DIP switches.
The layout provided connections for:
- Two (2) joystick gameport connections used with CH Flightsticks & it's buttons
- A radio modem/tether port
- An Auxiliary Input port for user created switches and potentiometers
Get Microsoft Excel Viewer
Get Microsoft PowerPoint Viewer
Get WinZip